1简介串行通信是计算机和其他设备交换数据时经常使用的方法之一。具有实现简单,使用灵活方便,数据传输可靠的优点。
因此,它广泛用于工业监控,数据采集和实时监控系统。应用。
高速串行数据采集软件的设计不同于普通的串行通信。它需要实时存储接收到的数据,同时从数据采集设备接收大量数据。
如果两者之间的关系处理不当,将导致数据丢失甚至程序崩溃。这要求应用程序能够同时处理两个或多个不同的任务。
Win32是基于线程的抢占式多任务操作系统,使应用程序可以同时执行多个任务,即在一个进程中可以同时运行多个线程。线程是指程序的执行路径,并且系统不断在多个线程之间切换。
由于时间短,似乎多个线程正在同时运行。对于通信而言,需要花费大量时间来测试I / O操作,同时维持对应用程序其他用户操作的响应,创建多线程是最佳选择。
2系统结构系统的组成结构如图1所示。中央控制PC为系统核心要求数据采集软件具有良好的稳定性和兼容性。
因此,独立设计了一套基于Visual C ++ 6.0的多线程通信软件。这是与前端扫描仪串行端口的典型主从通信。
MOXA公司的串口卡实现了500K波特率的采集。 3使用MSComm控制实现高速串行数据收集的问题。
MSComm控制在串行编程中非常方便。程序员无需花费时间来了解更复杂的API功能,只需要在串行通信资源(ProperTIes)的属性中配置串行端口即可。
波特率,数据位,停止位,奇偶校验,发送缓冲区大小,接收缓冲区大小和串行通信的超时设置都在这里。串口配置完成后,可以打开串口进行数据读写。
对于常规数据交换和串行通信,MSComm控件可以完全满足要求。但是,由于控件自身的接收缓冲区大小设置的限制,因此是高速的。
数据采集软件的设计带来了麻烦。如果接收缓冲区不能满足设计要求,则当缓冲区中的数据达到消息响应值并响应存储命令时,新收集到的数据的传输速度将大于接收到的数据的存储速度,这将导致接收缓冲区溢出并直接导致系统崩溃。
在程序设计的早期阶段就对此深有理解。在程序设计中,当缓冲区达到响应消息的阈值时,它还会尝试在消息响应中启动新线程。
,首先将缓冲区中接收到的数据取出到新打开的存储单元中,然后再存储该数据。该程序可以运行,但是出现了一个新问题,即某些数据帧中的数据丢失了。
分析产生此结果。数据丢失的原因仍然是由于控制所致。
接收缓冲区的大小受到限制。 4程序设计创新4.1多线程编程思想在32位Windows系统中,术语多任务意味着系统可以同时运行多个进程,并且每个进程也可以同时执行。
多线程。该进程是应用程序的运行实例。
每个进程都有自己的专用虚拟地址空间,每个进程都有一个主线程,但是可以创建其他线程。进程中的线程是并行执行的,每个线程占用系统CPU的时间除以系统。
可以被视为分配CPU时间的操作系统的基本实体。系统会在线程之间不断切换,并且对线程的中断是汇编语言级别。
系统为每个线程分配了一个CPU时间段,并且一个线程仅在分配的时间段内对CPU拥有控制权。进程中的所有线程共享进程的虚拟地址空间,这意味着所有线程都可以访问进程的全局变量和资源。
一方面,它给编程带来了便利,但另一方面,它也容易引起冲突。尽管过程中耗时的工作不会导致系统挂起,但会导致过程挂起。
所以,如果公关。













公司: 深圳市捷比信实业有限公司
电话: 0755-29796190
邮箱: ys@jepsun.com
产品经理: 李经理
QQ: 2057469664
地址: 深圳市宝安区翻身路富源大厦1栋7楼

更多资讯
获取最新公司新闻和行业资料。
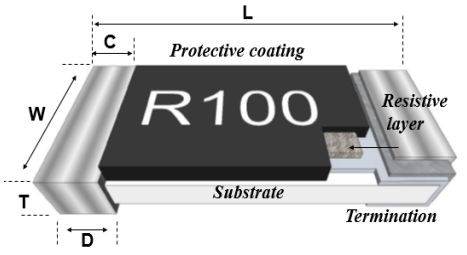
- 金属膜电阻读取技术:从信号采集到数据处理全流程详解 金属膜电阻读取的核心流程在现代电子系统中,金属膜电阻不仅是基础元件,更是实现精准电流/电压检测的关键组件。其读取过程涉及信号采集、放大、滤波与数字化处理等多个环节。1. 信号采集阶段通过将金属膜电阻串联于主...
- 如何通过精准采购提升电子系统稳定性?——精密排阻采购指南 如何通过精准采购提升电子系统稳定性?——精密排阻采购指南在高可靠性电子系统中,一个看似微小的电阻元件,其性能波动可能引发整个系统的误差甚至失效。因此,科学地进行精密排阻采购,是保障系统长期稳定运行的重...
- UART串口桥接器:实现设备间通信的高效解决方案 UART串口桥接器概述UART(通用异步收发传输器)是一种广泛应用于嵌入式系统和工业控制中的串行通信协议。随着物联网(IoT)和智能设备的发展,设备之间的数据交换需求日益增长,而UART串口桥接器正是解决这一问题的关键技...
- PCI Express讯号切换器:提升系统扩展性与数据传输效率的关键设备 PCI Express讯号切换器的核心功能与应用价值随着计算机系统对高速数据传输需求的不断增长,PCI Express(PCIe)已成为主流的高速串行总线标准。在复杂系统架构中,PCI Express讯号切换器扮演着至关重要的角色,它能够实现多条PCIe通...
- 基于KVM与打印机系统的自动化集成解决方案设计与实施 基于KVM与打印机系统的自动化集成解决方案设计与实施在现代企业信息化建设中,如何实现多设备间的高效协同已成为关键挑战。本文以打印机系统JK与KVM切换器为核心,探讨一套完整的自动化集成方案,涵盖架构设计、软硬件选...
- 深度解析:如何优化ALPS电位器与PDCALPSTIA的集成设计以提升系统稳定性 ALPS电位器与PDCALPSTIA集成设计的关键要点虽然ALPS电位器与PDCALPSTIA在功能上高度互补,但若设计不当,仍可能引入噪声、非线性误差或响应延迟等问题。以下从电路布局、电源管理、滤波设计等方面提出优化建议,帮助工程师构建...
- 如何优化微分时钟信号缓冲器的设计以提升系统稳定性 优化微分时钟信号缓冲器设计的关键策略随着电子系统向更高频率、更低功耗方向发展,微分时钟信号缓冲器的设计面临更大挑战。合理的布局布线、电源管理及器件选型是提升系统稳定性的关键。1. PCB布局与走线优化差分信号...
- 如何正确选择与使用55V至100V BJT电路图进行系统设计 55V至100V BJT电路图设计要点在构建高压系统时,正确选用并绘制55V至100V BJT电路图是保障系统安全与性能的关键。以下为设计过程中的关键步骤与建议。1. 确定工作电压与负载需求• 分析系统最大工作电压,确保所选BJT的额定电压...
- 构建智能车载电源系统:频率IC、充电器IC与保护IC的集成设计策略 智能车载电源系统中三大IC的集成设计与协同优化随着汽车电子化程度不断提高,对电源管理系统的集成度、智能化与可靠性提出了更高要求。车用频率IC、充电器IC与保护IC的集成设计,已成为新一代智能车载电源系统的核心技术...
- 深入解析:如何通过SBR与MOSFET协同设计实现高能效电源系统 高能效电源系统中的核心组件协同机制在追求极致能效的现代电子设备中,如5G基站、AI加速卡、工业电源等,电源转换效率直接决定系统能耗与运行成本。而其中,整流环节是主要的损耗来源之一。采用SBR整流器与MOSFET协同设计...
- 深入解析:数码管电阻计算与影像译码器在嵌入式系统中的集成应用 数码管电阻计算与影像译码器的嵌入式集成实践在嵌入式系统开发中,将影像译码器与数码管显示模块结合,实现高效、直观的人机交互界面,已成为主流趋势。本文从实际工程角度出发,深入探讨两者的集成逻辑与关键设计要...
- 气体放电管在通信系统中有哪些用途? 气体放电管在通信系统中主要用于防雷保护和瞬时过压保护。它可以将雷电流泄放入大地,以防止通信系统遭受雷电侵害。此外,它还可以用于通信产品类端口、工业产品类端口以及消费电子类端口的保护。在通信系统中,气体...
- 分立组件功能数组在系统设计中的应用与优势 在现代系统的构建中,分立组件功能数组的应用日益广泛,这不仅是因为它能够提高系统的灵活性和可维护性,还因为它能够在复杂的系统环境中实现更高效的资源分配和管理。分立组件功能数组指的是将系统功能按照特定规则...
- 深入解读WAN2012K245H02与WAN2012H245C04数据手册中的关键设计要点 前言随着工业自动化与物联网技术的快速发展,电子元器件的选型标准日益严格。对于研发人员而言,准确理解数据手册中的各项指标至关重要。本文聚焦于WAN2012K245H02与WAN2012H245C04的数据手册内容,从可靠性、信号完整性、EMC防...
- 晶体管功放拓扑设计:从传统架构到智能集成的新趋势 晶体管功放拓扑设计:从传统架构到智能集成的新趋势晶体管功放拓扑作为电子系统中的核心模块,其设计正经历一场由材料革新与智能控制驱动的深刻变革。传统的线性功放(如AB类)虽然音质优良,但效率低下;而基于新型晶...
- 触控屏幕控制器原理详解:从信号采集到人机交互的全过程 触控屏幕控制器原理详解触控屏幕控制器是实现触摸交互的核心硬件组件,广泛应用于智能手机、平板电脑、工业控制面板及智能家居设备中。其核心功能是实时检测用户手指或触控笔的位置,并将这些信息转化为数字信号,供...
- 如何提高系统安全性以防止数据泄露 在当今数字化时代,数据安全成为企业和个人必须重视的问题。数据泄露不仅会损害企业声誉,还可能导致严重的经济损失和法律问题。为了提高系统的安全性以防止数据泄露,可以采取以下几个措施:1. 强化访问控制:确保只...
- 深入理解2.4GHz Wi-Fi电路设计:构建高效稳定的无线通信基础 2.4GHz Wi-Fi电路设计的关键要素尽管5GHz频段性能优越,但2.4GHz仍是目前最广泛使用的无线频段,尤其在物联网设备和老旧终端中占据主导地位。因此,科学合理的2.4GHz电路设计是保障整体网络稳定性的基石。射频信号完整性控制2....
- 欧姆龙V/Z/D4MC等系列行程开关:性能与可靠性的典范 V/Z/D4MC等系列欧姆龙行程开关是工业自动化领域中不可或缺的组成部分。这些行程开关以其出色的性能和可靠性在各种应用中发挥着关键作用。例如,V系列行程开关具有紧凑的设计,适用于空间有限的应用环境;而Z系列则以其卓...
- 用采样电阻和霍尔采集电流哪个准? 目前,汽车行业中有两种流行的检测技术。一种是对大功率精密电阻进行电流采样,另一种是对霍尔电流传感器输出的电压信号进行采样,另一种是检测输送器电路输入到MCU,经过处理后,检测方法输入到MCU(简称霍尔采样法)...